![]()
7.26. Appendix 1: Sizing equations#
Summary of all sizing equations (sizing scenarios and estimation models).
Here is a convention used to express variables:
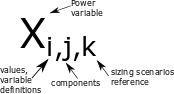
Fig. 7.29 Glosary for variable naming#
When coding the variable, the comas , are replaced with underscores _for example \(T_{nom,mot,hov}\) will be coded T_nom_mot_hov.
7.26.1. General notation#
7.26.1.1. Power variables#
\(F\) : force, thrust \([N]\)
\(T\) : torque \([N.m]\)
\(\Omega, n\) : rotational speed \([rad/s]\), frequency \([rev/s]\)
\(P\) : power \([W]\)
\(U\) : voltage \([V]\)
\(I\) : current \([A]\)
\(V\) : drone speed \([m/s]\)
\(K_T\) : Kt motor \([N.m/A\) or \(V/(rad.s^{-1})]\)
\(J\) : Inertia \([kg.m^2]\)
\(E_b\) : Energy battery \([J]\)
7.26.1.2. Geometrical dimensions#
\(r\) : radius \([m]\)
\(l\) : length \([m]\)
\(D\) : diameter \([m]\)
\(H\) : outer height of a rectangular cross section \([m]\)
\(h\) : inner height of a rectangular cross section \([m]\)
\(p\) : pitch \([m]\)
\(S\) : surface \([m^2]\)
7.26.1.3. Other variables:#
\(M\) : Mass \([kg]\)
\(g\) : Gravity constant \([N/kg]\)
\(N_j\) : number of “j” component
\(\rho_{air}\) : air volume density \([kg/m^3]\)
\(\rho_{s}\) : structural material volume density \([kg/m^3]\)
\(C_x\) : Drag coefficient
\(C_T\) : Thrust coefficient
\(C_P\) : Power coefficient
\(time\): Max current time
7.26.1.4. Index \(i\) (values, variable definition):#
\(moy\) : nominal
\(max\) : maximum
\(min\) : minimum
\(fr\) : friction
\(total\) : all components
\(out\) : outer
\(in\) : inner
7.26.1.5. Index \(j\) (components)#
\(pro\) : propeller
\(mot\) : motor
\(esc\) : ESC
\(bat\) : battery
\(arm\) : arm
\(lg\) : landing gear
\(pay\) : payload
\(body\): core frame
\(frame\): body + arm
7.26.1.6. Index \(k\) (sizing scenarios, reference values)#
\(hov\) : Hover
\(to\) : Take-Off
\(stat\) : advance speed V=0 (hover or take-off scenario)
\(ref\) : reference value for scaling laws
\(mvs\) : Maximum vertical speed
7.26.2. Balance mass#
\(M_{total}=\left(M_{mot}+M_{esc}+M_{pro}\right) \cdot N_{pro}+ \left(M_{arm}+M_{LG}\right) \cdot N_{arm}+M_{body}+M_{bat}+M_{pay}\)
7.26.3. Global forces#
Hover:
\(F_{total,hov} = M_{total}g\)
Take-Off:
\(F_{total,to} = M_{total}\left(g + a_{to}\right)\)
Maximum Vertical speed:
\(F_{total,mvs}=M_{total} \cdot g+\frac{1}{2}\rho_{air} \cdot C_x \cdot S \cdot V^2\)
Total force per propeller:
\(F_{pro,j}=\frac{F_{total,j}}{N_{pro}}\)
7.26.4. Propeller#
Rotational speed of propeller:
\(\Omega_{pro,k} = n_{pro,k} \cdot 2\pi\)
Thrust generated per propeller:
\(F_{pro,k} = C_t\rho n_{pro,k}^2 D_{pro}^4\)
Power generated per propeller:
\(P_{pro,k} = C_p\rho n_{pro,k}^3 D_{pro,k}^5\)
Torque:
\(T_{pro,k} = \frac{P_{pro,k}}{\Omega_{pro,k}}\)
Scaling laws equations:
\(M_{pro}=M_{pro,ref}\left(\frac{D_{pro}}{D_{pro,ref}}\right)^3\)
Extracted from regressions models based on APC Propellers:
\(C_{t,pro,k,stat}=4.27 \cdot 10^{-2} + 1.44 \cdot 10^{-1}\frac{p_{pro,k}}{D_{pro,k}}\)
\(C_{p,pro,k,stat}=-1.48 \cdot 10^{-3} + 9.72 \cdot 10^{-2}\frac{p_{pro,k}}{D_{pro,k}}\)
7.26.5. Motor#
Analytical equations:
\(T_{mot,k} = K_TI_{mot,j}\)
\(T_{mot,k} = T_{pro,k}+T_{fr,mot,k}\)
\(U_{mot,k} = K_T\Omega_{pro,k} + R_{mot}I_{mot,k} \)
\(P_{mot,k}= U_{mot,k} \cdot I_{mot,k}\)
Scenario condition:
\(T_{max,mot,k}>T_{pro,to}\)
Scaling laws:
\(M_{mot}=M_{mot,ref}\left(\frac{T_{nom,mot}}{T_{nom,mot,ref}}\right)^{3/3.5}\)
\(T_{max, mot}=T_{max, mot,ref} \frac{T_{nom, mot}}{T_{nom, mot,ref}}\)
\(T_{mot,fr}=T_{mot,fr,ref} \left(\frac{T_{nom}}{T_{nom,ref}}\right)^{3/3.5}\)
\(R_{mot}=R_{mot,ref}\left(\frac{K_T}{K_{T,ref}}\right)^2 \left(\frac{T_{nom}}{T_{nom,ref}}\right)^{-5/3.5}\)
\(J_{mot}=J_{mot,ref}\left(\frac{T_{nom,mot}}{T_{nom,mot,ref}}\right)^{5/3.5}\)
7.26.6. ESC#
Corner power or apparent power:
\(P_{esc,to}=P_{mot,to}\frac{U_{bat}}{U_{mot,to}}\)
Scenario condition:
\(P_{esc}>P_{esc,to}\)
Scaling laws:
\(U_{esc}=U_{esc,ref}\left(\frac{P_{esc}}{P_{esc,ref}}\right)^{1/3}\)
\(M_{esc} = M_{esc,ref}\frac{P_{esc}}{P_{esc,ref}}\)
7.26.7. Battery#
Condition for voltage : \(U_{bat} > U_{mot,to}\)
Condition for power : \(U_{bat}I_{bat} > \frac{U_{mot,to}I_{mot,to}N_{pro,to}}{\eta_{esc}}\)
Condition for autonomy: \(0.8C_{bat} > I_{bat} \cdot t_{hov}\)
Voltage battery: \(U_{bat}=3.7 \cdot N_{s,bat}\)
Capacity battery: \(\displaystyle C_{bat}=\frac{E_{bat}}{U_{bat}}\)
Scaling laws:
\(I_{max,bat}=I_{max,ref}\frac{C_{bat}}{C_{bat,ref}}\)
\(M_{bat}=M_{bat,ref}\frac{U_{bat}}{U_{bat,ref}}\frac{C_{bat}}{C_{bat,ref}}\)
\(E_{bat}=E_{bat,ref} \cdot \frac{M_{bat}}{M_{bat,ref}}\)
7.26.8. Frame#
Max force per arm: \(\displaystyle F_{max,arm} = N_{pro,arm} \cdot F_{pro,k}\)
Minimum arm length: \(\displaystyle L_{arm}>\frac{D_{pro}/2}{sin(\pi/N_{arm})}\)
Max stress for square section:
for circular hollow section: \(\displaystyle \frac{F_{max,arm} \cdot L_{arm}}{\frac{\pi \cdot \left(D_{out}^4-D_{in}^4\right)}{32 \cdot D_{out}}}<\sigma_{max}\)
for square hollow section: \(\displaystyle \frac{F_{max,arm} \cdot L_{arm}}{\frac{H^3}{6}-\frac{h^4}{6 \cdot H}} <\sigma_{max}\)
Total mass beams:
for circular hollow section: \(M_{arm}=\frac{\pi}{4} \cdot \left(D_{out,arm}^2-D_{in,arm}^2\right) \cdot \rho_{s} \cdot L_{arm}.N_{arm}\)
for square hollow section: \(M_{arm}=\left(H_{out,arm}^2-H_{in,arm}^2\right) \cdot \rho_{s} \cdot L_{arm} \cdot N_{arm}\)
Mass of global frame: \(M_{frame}=M_{frame,ref}\left(\frac{M_{arm}}{M_{arm,ref}}\right)\)